����
�������g���£��༼�g�ںϴ�������Ѳ�z����
����
������Դ�ںό������g
����
����ú�V���h�����s��׃��GPS��̖��ȱʧʹ�Â��y�Ķ�λ�������g�y�Ԟ��^���鹥���@һ�y�}��ԓ�C���˄����Ե��ں��˼������_��ҕ�X���C�c�T�Ԝy����Ԫ��IMU����������һ�����M�ļ������_�T��ҕ�X��̜y��ϵ�y��LIVO�����ڌ��H�����У��������_ؓ؟���܇��h���M�и߾��Ȓ��裬���ɴ������_���c�Ɣ��������ճ��V���ȵ����S݆����ҕ�X���C�t���J�ز��h���еļy����Ϣ����C���˵�ҕ�X�R�e��������ȡ�ṩ�S���ļ���֧�֣����T�Ԝy����Ԫ��IMU���t���r�y���C���˵��ˑB�ͼ��ٶ�׃�����_���C�������Ƅ��^���еķ����ԡ�
����
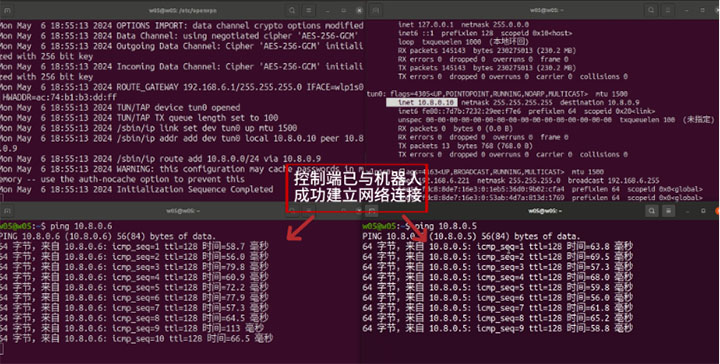
����5G+VPNͨ�ż��g����
�����ڵV���£�ͨ����̖�����c������һֱ�����_Ѳ�z�������y�}����_���C�����܉��c����������ı����r�������Ĕ�����ݔ��ԓ�C���˲�����5G+VPN��ͨ�ŷ�����5G�W�j�{���䳬�ߵĎ������O�͵����t�Լ�Խ�Ŀɿ��ԣ���C���˴��һ�l���ٷ����Ĕ�����ݔͨ������������D��ҕ�l�Լ������������܉�˲�g��ݔ������������ģ����F��Ϣ�ğo�K��ͨ����VPN���g�t��ͬ�o�@�l������ݔͨ��������һ�ӈԲ��ɴݵ��z�ף��ڴ˻��A�Ϙ�����һ����ȫ��̓�M���þW�j���\�Ï��s�ļ����㷨��������C�C�ƣ��_��������ݔ�ı����Ժ������ԣ���Ч�����ڿ���������й¶�Ȱ�ȫ���{��ͨ�^��VPN�������Ʒ��������c5G�W�j��ݔ��Y�ϣ��C���˟oՓ��̎�V�����Ă����䣬�oՓ�܇��h����ô���ӣ������c�������Ľ��������r����ȫ��ͨ���B�ӡ�
����
���������ݣ���Ⱥ�f������Ѳ�zЧ������
�����յfͬ���V�����w
����
�������y�Ć�һ����Ѳ�z�C�������挦ú�V�����s��׃�����I�h���r�������������ġ����˽�Q�@һ���}��ԓ�C���˄����Եز����˿յfͬ����ģʽ��������һ���������w��V������Ѳ�z�C���˼�Ⱥ����Ⱥ�а����Ď�ʽѲ�z�C���ˡ�׃��ʽ�յɗ�Ѳ�z�C���˺����f���C���˵ȶ�N��ͣ�������˾������f������ͬ��ɵV��Ѳ�z�΄ա��Ď�ʽ�C��������N�߾��Ȃ��������܉��ڪMխ��������з���ǰ�У��������O��ͭh���M�н����x��ȫ��λ�ęz�y�������Ď��OӋʹ��߂䏊���Խ���������oՓ����ʯ������߀��ˮ�ӣ������p�ɿ�Խ���_��Ѳ�z�΄ղ��ܵ������ơ�׃��ʽ�յɗ��C���˄t�{���䪚�ص�ģ�B�ГQϵ�y���܉�����΄�������ꑵ����Ϳ����w��ģʽ�g�����ГQ��չ�F���������`���Ժ��m���ԡ�
����
��������Խ�������ɿ��ĵVɽ��ȫ�lʿ
����
����VR+���\�����g
����
�������˽o�����ˆT�ṩһ��ֱ�^������ҳ���ʽ���h�̱O�غͲ����w�C������������M��VR+���\�����g��ͨ�^��VRƽ�_�¾��Ę����V���Ĕ��\��ģ�ͣ������ˆT�·������ڵV��֮�У��H���w�C���˵�Ѳ�z�^�̡����@���߶ȱ����̓�M�h���У������ˆT����360�ȟo���ǵ��^��V����ÿһ�����������r�@ȡ�C���˵�λ�á��ˑB���������������S����Ϣ���������ՙC���˵Ĺ�����B��
����
�������Iָ���̎����I����
����ԓ�Ŀ�܉�ȡ������@���ijɹ����x���_�������Ƽ���W�Y����ڵ�Ϥ��ָ�����@Щָ���̎��ڙC���˼��g���Ԅӻ����ơ��˹����ܵ��I��������Č��I֪�R���S���Ŀ��н����Ŀ�аl�^���У�ָ���̎���ȫ�̅��c����F��ṩ��ȫ��λ�ļ��gָ����֧�֡����Ŀ���x�}�������OӋ�������g���F���yԇ������ÿһ���h�����������������ǻۺ���Ѫ���ڈF��������g�y�}�r��ָ���̎����{�������ČW�g��Ԅ�͌��`���܉�Ѹ�ٶ��솖�}�ı��|����W���ṩ�P�I�Ե�ָ���ͽ��h�������F�ͻ�Ƽ��gƿ�i���_���Ŀ��������M���������H�LjF꠵ļ��g���������LjF꠵ľ����I�䣬�������W����������Խ�����ʿƌW�߷塣
����
�����ɹ��D��������ú�V��I������Ч�c��ȫ��������
�����S�����Ҍ�ú�V��ȫ���a�����ܻ����O����ҕ�̶Ȳ�����ߣ�ú�V��I���R���������ıO��Ҫ��ͼ��ҵ��Ј�������ԓú�V���܅f��ʽѲ�z�C���˵Ć�������ú�V��I������һ�Nȫ�µ����ܻ�Ѳ�z��Q�����������ڶ��������ú�V��I�����@����Ч�档�������p���˹�Ѳ�z���l�κ�������������I�������ɱ�Ͷ�롣ͬ�r���C�����܉r�O�y�V���h�����O���B�����r�l�F���ڵİ�ȫ�[�����l��������Ч�����Vɽ��ȫˮƽ�����⣬�C���˸�Ч��Ѳ�z�����Ϳ���푑��C�ƣ��܉r�l�F�O����Ϻ����a�^���еĆ��}���p���O��ͣ�C�r�g�����a�Д���l�ʣ�������a���B�m�Ժͷ����ԣ����ӽ���Ч�档Ŀǰ��ԓ�Ŀ���c��Ҵ���ú�V��I�_�ɺ������ɹ��D��ǰ���V韣�����ú̿���I�İ�ȫ���a�����ܻ��lչע�돊�������
����
�����������Ƽ���W���ЈF꠳ɹ��аl��ú�V���܅f��ʽѲ�z�C���ˣ���Vɽ��ȫѲ�z�_����һ�l���ܻ�����Ч�����ɿ�������·�������ЏV韵đ���ǰ�������h���ИI���x����δ���İlչ�У��@һ�ɹ��،��ڵVɽ��ȫ�I��l�]Խ��Խ��Ҫ�����ã��_���Vɽ����Ѳ�z���¼oԪ�����҇�����Դ�a�I��ȫ�lչ���ΈԌ��������Vɽ���a׃�ø��Ӱ�ȫ�����ܺ�Ч�� - ��һ�� ���퐂�x



